大家好,如果您还对测力机器人多少钱一台不太了解,没有关系,今天就由本站为大家分享测力机器人多少钱一台的知识,包括测力机器人摆地摊怎么样的问题都会给大家分析到,还望可以解决大家的问题,下面我们就开始吧!
智能机器人十大排名
〖壹〗、大象机器人 大象机器人是我国智能机器人领域的一面旗帜,以其出色的性能和实用性赢得了广泛赞誉。 飞利浦扫地机器人 飞利浦扫地机器人配备了18个传感器,有效避障,多种清洁模式,大吸力和持久续航力,为消费者带来超强体验。
〖贰〗、SpotMini 美国波士顿动力公司制造的四足机器人SpotMini,在办公室和户外均能自如活动。它搭载了具备SLAM和避障功能的3D视觉系统,能够感知环境并避开障碍。SpotMini能爬楼梯、开门,甚至送饮料。该机器人由工作人员远程操控,并可自主完成任务,依据导航进行行动。
〖叁〗、发那科:上海发那科机器人有限公司,由全球领先的工厂自动化厂商发那科公司与上海电气集团共同投资成立。该公司拥有强大的研发、设计及制造能力,技术上具有明显优势。

安川一套程序如何控制几台机器人?
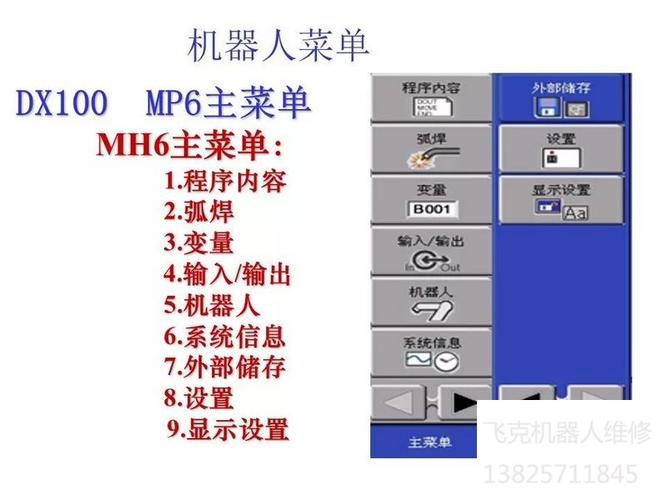
通过外部控制安川驱动模式切换是远程模式。根据查询相关的 *** 息显示,通过外部控制安川驱动模式切换,需将示教器的模式选择开关旋转到“REMOTE”即远程模式,利用DX100MXT以及I/O单元中的输入/输出信号对机器人进行控制。
数万行甚至更多。安川机器人程序更大行数与具体型号和控制器有关。一般来说,当今的安川机器人控制器支持的程序行数已经非常多,更高可以达到数万行甚至更多。
可以在手操器上切换坐标系,切换为关节坐标系就可以单独操作机械手臂。切换到用户坐标系可以实现同时转动。
打开控制柜上的电源开关,在“ON”状态。选择机器人的运动模式为“单步模式”。在单步模式下,可以逐个执行程序中的指令,并观察机器人的运动状态和位置。
安川机器人程序可以通过读取和写入硬盘文件进行分段。读取和写入硬盘文件的意思具体的操作就是,看硬盘里面的文件,拷贝文件到硬盘,总和操作就是把硬盘的文件从一个位置移动到另外一个位置。
*** 智能机器人是什么?
〖壹〗、智能 *** 机器人是人工智能技术商业化落地场景中最为成熟的一个应用场景,根据沟通类型又可以分为在线智能 *** 机器人和 *** 智能 *** 机器人。智能 *** 机器人集成了语音识别、语义理解、知识图谱、深度学习等多项智能交互技术。
〖贰〗、目前, *** 机器人规划包含两个版本,半自动机器人是以 *** 助手为定位的 *** 工具,另外一个是以降低 *** 咨询量为定位的全自动应答机器人。
〖叁〗、店小蜜是阿里官方推出的商家版智能 *** 机器人。这是一款面向淘系千万商家的智能 *** ,通过店小蜜官网及千牛工作台,所有 *** 及天猫商家可以零门槛提交申请。经过授权、调试,商家可以让店小蜜取代部分 *** ,从而降低人工 *** 的工作量。
〖肆〗、Alibaba宣布将推出人工智能智能机器人“商店小蜜”。这是一个面向 *** 干万店家的智能 *** 系统,根据店小蜜官网和千牛工作台, *** 网和天猫商城的所有店家都可以零门槛提交申请办理。经过授权,调整,店家可以让店小蜜代替部分在线 *** ,从而减少人工服务的工作量。

什么是机器人,并说说它的发展经历了几代?
〖壹〗、Shakey可以算是世界之一台智慧机器人,拉开了第三代机器人研发的序幕。 1969年 日本早稻田大学加藤一郎实验室研发出之一台以双脚走路的机器人。加藤一郎长期致力于研究仿人机器人,被誉为“仿人机器人之父”。
〖贰〗、随着人们对机器的研究,机器人也在进步,按其发展过程机器人可分为三代:之一代是示教再现型机器人:尤尼梅特和沃尔萨特兰这两种最早的工业机器人是示教再现型机器人的典型代表。
〖叁〗、GOOGLE *** 定义:机器人是自动控制机器(Robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。机器人技术作为20世纪人类最伟大的发明之一,从60年代初问世以来,经历四十多年的发展已取得长足的进步。
〖肆〗、年美国英格伯格和德沃尔(Devol)制造出世界上之一台工业机器人,到了七十年代后,随着计算机的发展,机器人才广泛应用于工业的生产上。随着机器人的广泛应用,机器人技术也由单一的工业生产方面进一步向各个领域延伸和应用。
〖伍〗、说完人工智能的来源,我们再来 说说 什么叫人工智能。 总的来说人工智能就是对人的意识、思维信息过程的模拟,并生产出一种能以人类智能相似的方式做出反应的机器。根据其定义可以分为两部分“人工”和“智能”。“人工”很好理解就是人为制造出来的。
怎样做一个行走机器人
〖壹〗、直立行走的机器人,个人觉得最重要的是腿。首先要确定腿上有多少个自由度,要用什么样的驱动机构和执行机构。然后再去找对应的驱动器和控制器,设计上层软件和控制程序。这样你的机器人就能直立行走动起来了。在robot360 中国机器人网上有很多机器人设计入门方面的书籍,建议你去看看,希望对你有帮助。
〖贰〗、首先,将一张正方形纸折成半个三角形,然后对折对角线,打开后按照已有的对角线再次折叠成三角形。接着,在纸张靠近对角线处对折,形成一个折叠旋转的小三角形。将同样大小的白色或彩色正方形纸张按照相同的 *** 折叠,完成4片小三角形。
〖叁〗、机器人的眼睛其实就是一个传感器。它的作用是观察周围的环境,适合做机器人眼睛的有激光雷达、视觉(深度相机、单双相机)、辅助(超声波测距、红外测距)等。“脑”机器人的大脑就负责接收“眼睛”传输的数据,实时计算出路线,指挥腿去移动。其实就是要把看到的东西转换为数据语言。
〖肆〗、例如:一般智能的机器人都是用单片机芯片(MCU微处理器)做控制,简单一点的也需要由一些电阻、电容之类的电子元件组成的电子电路做控制。
〖伍〗、一个PICAXE-28X1单片机 这是机器人的“主脑”,他是非常方便且可编程的微控制器。一个 PICAXE-28X1单片机的发动机包 在这个包里的28针工程主板就像游戏超级玛莉一样有趣,并且充满的特别而隐藏的特性,它使得你玩了还想玩。

机器人的传感器主要检测什么?
内部传感器主要用来检测机器人各内部系统的状况,如各关节的位置、速度、加速度温度、电机速度、电机载荷、电池电压等,并将所测得的信息作为反馈信息送至控制器,形成闭环控制。
a.内部传感器:用来检测机器人本身状态(如手臂间角度)的传感器。多为检测位置和角度的传感器。b.外部传感器:用来检测机器人所处环境(如是什么物体,离物体的距离有多远等)及状况(如抓取的物体是否滑落)的传感器。
速度传感器可以检测机器人的运动速度和方向,帮助机器人实现速度控制和运动轨迹规划。常见的速度传感器包括编码器、陀螺仪等。角度传感器 角度传感器可以检测机器人的姿态和角度,帮助机器人实现平衡控制、转向控制等功能。常见的角度传感器包括加速度计、陀螺仪、电子罗盘等。
内部传感器(体内传感器):主要测量机器人内部系统,比如温度,电机速度,电机载荷,电池电压等。外部传感器(外界传感器):主要测量外界环境,比如距离测量,声音,光线。根据传感器的运行方式,可以分为:被动式传感器:传感器本身不发出能量,比如CCD,CMOS摄像头传感器,靠捕获外界光线来获得信息。



